欢迎来到高密市盛宝特机械制造有限公司网站!

 13053636818
13053636818




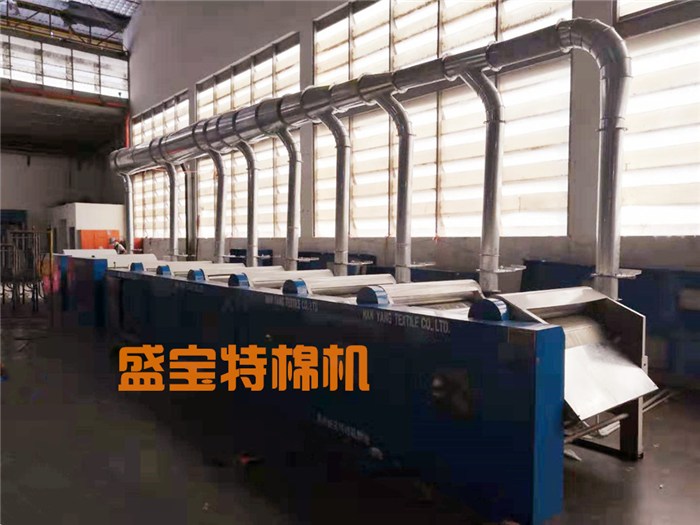
开松机前区集合器
在各种型式的开松机上,前区集合器大都采用两只并联、在前罗拉颈上有平衡小锤的上开口集合器。集合器的口径,特别是集合器出口宽度(高度方向应该使摩擦力界基本没有或甚小)随须杂的号数而变。
在设计献区集合器出口孔眼的口径肘,也可参照纤维在集合器出口孔眼内的充满系数公式计算,再经试验后决定。假设在头道开松机前区集合器出口孔眼内的纤维的充摘系数为3.3%。
同理,可求得二、三道租纱机前区集合器出口孔眼宽度如表4-43所示。










开松机逻辑控制系统
程序控制给定器以单片机8031为核心构成,其框图如图6-2所示。
钢领板动程控制有的采用机械童在模、红外光电控制器.键速和钢领板动程的控制系统框图如图6-3所示。
2.环饺知纱机的逻辑控制线路环链开松机的控制线路除满 足上述要求外,还应对电动机进行短路保护和过载保护$在故障发生时能真时停满管时能提战信号,使矶暴停车。
领极自动上升翻转等。环镀开松机控制系统如图6-4所示。

开松机开口机构的几种负荷
1.开松机经纱张力的方向是沿着经纱的方向,因此综框在平综位置以上时,经纱张力的垂直分力向下s综框在平综位置以下时,经纱张力的垂直分力向上。经纱张力的数值在平综时小,满开时大。设计新机时,可以在相近类型的织机上,用实验方法求得经纱张力的数值,然后用类比法估计新机的经纱张力。例如,将图7-14(甲)中的传动杆Be和DE卸去,用弹簧秤将综框由平综位置提到梭口满开位置, 弹簧秤上指出的读数便是全片经纱张力在垂直方向的合力。不过,这样测出的是静态的经纱张力,它与运转时的实际动态张力是有出入的,在条件许可时,锺好用非电量电测法测出动态经纱张力。
2.开松机各构件的惯性力F。这也是个变化的负荷。因为综握的 运动是变速运动,采用简谐运动规律时,平综时加速度为零,惯性力也为零,即将满开时加速度大,惯性力也大F待综框避入静止阶段后,惯性力又等于零。
3.各构件的重力G。
4.各运动副之间的正压力N。
5.各运动副之间的摩擦力,这些摩擦力的数值很小,与经纱 张力等各力相比,在数量级上相差很多。为了使计算方便起见,常将各运动副之间的摩擦力略去不计。
以上各力除重力外,其余各力在一个开口运动周期中数值和方向都在变化,必须找出危险的受力时刻。

扫一扫手机网站








 在线客服
在线客服 13053636818
13053636818 1033424483@qq.com
1033424483@qq.com